if = 72° and s = 20 cm, what is the value of r to the nearest tenth of a centimeter?
10 Fixed-Axis Rotation
ten.five Calculating Moments of Inertia
Learning Objectives
By the stop of this department, you volition be able to:
- Summate the moment of inertia for uniformly shaped, rigid bodies
- Use the parallel axis theorem to detect the moment of inertia about any axis parallel to ane already known
- Calculate the moment of inertia for chemical compound objects
In the preceding section, we defined the moment of inertia but did not show how to calculate it. In this department, we show how to summate the moment of inertia for several standard types of objects, too as how to utilize known moments of inertia to find the moment of inertia for a shifted centrality or for a chemical compound object. This section is very useful for seeing how to apply a full general equation to complex objects (a skill that is critical for more avant-garde physics and engineering courses).
Moment of Inertia
We divers the moment of inertia I of an object to be
![\[I=\sum _{i}{m}_{i}{r}_{i}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ccf44d963677e7315439abd7e8fd7e42_l3.png "Rendered by QuickLaTeX.com")
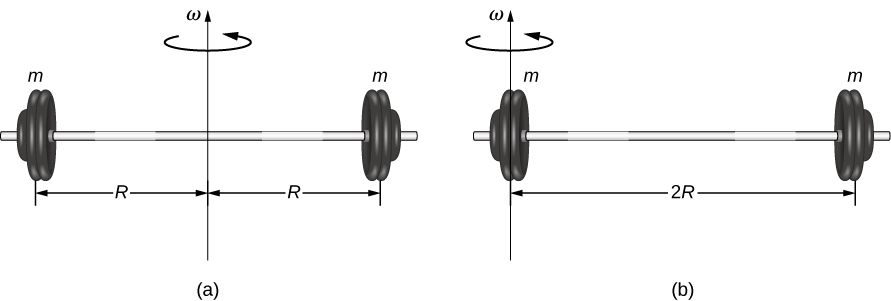
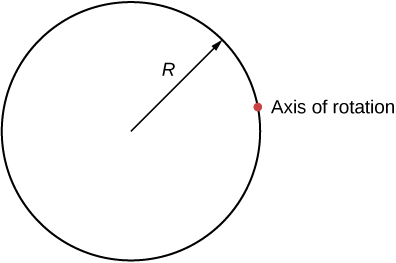
for all the bespeak masses that make upwards the object. Because r is the distance to the axis of rotation from each piece of mass that makes up the object, the moment of inertia for any object depends on the chosen centrality. To run across this, permit's have a simple instance of two masses at the finish of a massless (negligibly small mass) rod ((Figure)) and calculate the moment of inertia about two different axes. In this case, the summation over the masses is simple because the two masses at the cease of the barbell can be approximated as point masses, and the sum therefore has simply two terms.
In the case with the axis in the center of the barbell, each of the two masses m is a distance R away from the axis, giving a moment of inertia of
![\[{I}_{1}=m{R}^{2}+m{R}^{2}=2m{R}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-59238699567ea6ddc8388536a87872f7_l3.png "Rendered by QuickLaTeX.com")
In the case with the axis at the end of the barbell—passing through i of the masses—the moment of inertia is
![\[{I}_{2}=m{(0)}^{2}+m{(2R)}^{2}=4m{R}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ed31c385d9ff16664a203e363f756d01_l3.png "Rendered by QuickLaTeX.com")
From this result, nosotros can conclude that information technology is twice as hard to rotate the barbell about the end than about its eye.
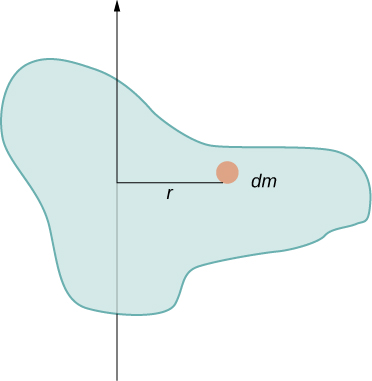
In this example, nosotros had two bespeak masses and the sum was simple to calculate. However, to bargain with objects that are not point-like, we need to think carefully near each of the terms in the equation. The equation asks usa to sum over each 'piece of mass' a certain distance from the axis of rotation. Merely what exactly does each 'slice of mass' mean? Think that in our derivation of this equation, each piece of mass had the same magnitude of velocity, which means the whole piece had to take a single altitude r to the axis of rotation. Even so, this is not possible unless we accept an infinitesimally pocket-sized slice of mass dm, every bit shown in (Figure).
The need to use an infinitesimally small-scale piece of mass dm suggests that we can write the moment of inertia by evaluating an integral over infinitesimal masses rather than doing a detached sum over finite masses:
![\[I=\sum _{i}{m}_{i}{r}_{i}{}^{2}\enspace\text{becomes}I=\int {r}^{2}dm.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-e8b3795fef5668c39e4db0f84b87c0d8_l3.png "Rendered by QuickLaTeX.com")
This, in fact, is the grade nosotros need to generalize the equation for circuitous shapes. Information technology is all-time to work out specific examples in detail to get a feel for how to calculate the moment of inertia for specific shapes. This is the focus of nigh of the residual of this section.
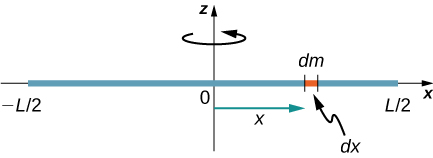
A uniform sparse rod with an centrality through the center
Consider a uniform (density and shape) sparse rod of mass M and length L as shown in (Figure). We desire a thin rod so that we can assume the cross-sectional area of the rod is small and the rod can be thought of equally a string of masses along a ane-dimensional direct line. In this example, the axis of rotation is perpendicular to the rod and passes through the midpoint for simplicity. Our task is to summate the moment of inertia about this axis. We orient the axes then that the z-axis is the axis of rotation and the ten-axis passes through the length of the rod, as shown in the figure. This is a convenient pick considering we can then integrate along the x-axis.
We ascertain dm to be a small element of mass making up the rod. The moment of inertia integral is an integral over the mass distribution. Still, nosotros know how to integrate over space, not over mass. We therefore demand to find a way to relate mass to spatial variables. We do this using the linear mass density
![\[\lambda\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ab40e408da0bd057cd6a2beecd9fb7c4_l3.png "Rendered by QuickLaTeX.com")
of the object, which is the mass per unit length. Since the mass density of this object is uniform, nosotros can write
![\[\lambda =\frac{m}{l}\enspace\text{or}m=\lambda l.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a588c2060bc19d089e74c2dd31c3a327_l3.png "Rendered by QuickLaTeX.com")
If we have the differential of each side of this equation, we discover
![\[dm=d(\lambda l)=\lambda (dl)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-73155f16633015330d0822637a316f3e_l3.png "Rendered by QuickLaTeX.com")
since
is constant. We chose to orient the rod along the x-axis for convenience—this is where that choice becomes very helpful. Note that a slice of the rod dl lies completely along the x-axis and has a length dx; in fact,
![\[dl=dx\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-d4f4bac2f881b90c74fb71b2c89946d6_l3.png "Rendered by QuickLaTeX.com")
in this situation. Nosotros can therefore write
![\[dm=\lambda (dx)\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-4f87c512195794e45bbc802b51f46c6f_l3.png "Rendered by QuickLaTeX.com")
, giving united states of america an integration variable that we know how to bargain with. The distance of each piece of mass dm from the axis is given by the variable 10, as shown in the figure. Putting this all together, we obtain
![\[I=\int {r}^{2}dm=\int {x}^{2}dm=\int {x}^{2}\lambda dx.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8d70873d04a0e37400b1a97e5c4630f0_l3.png "Rendered by QuickLaTeX.com")
The last step is to be careful nearly our limits of integration. The rod extends from
![\[x=\text{−}L\text{/}2\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0cf7ad499afae127b80a725c18b1c9d5_l3.png "Rendered by QuickLaTeX.com")
to
![\[x=L\text{/}2\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ef067ddc7da66ffbf9d2a72825c1b423_l3.png "Rendered by QuickLaTeX.com")
, since the axis is in the middle of the rod at
![\[x=0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-756a0fa8a6211eb21a7149fa425df6e5_l3.png "Rendered by QuickLaTeX.com")
. This gives united states of america
![\[\begin{array}{cc}\hfill I& =\underset{\text{−}L\text{/}2}{\overset{L\text{/}2}{\int }}{x}^{2}\lambda dx=\lambda \frac{{x}^{3}}{3}{|}_{\text{−}L\text{/}2}^{L\text{/}2}=\lambda (\frac{1}{3})[{(\frac{L}{2})}^{3}-{(\frac{\text{−}L}{2})}^{3}]\hfill \\ & =\lambda (\frac{1}{3})\frac{{L}^{3}}{8}(2)=\frac{M}{L}(\frac{1}{3})\frac{{L}^{3}}{8}(2)=\frac{1}{12}M{L}^{2}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3ab1986192ac808f9e310e52faf10dfd_l3.png "Rendered by QuickLaTeX.com")
Next, we calculate the moment of inertia for the aforementioned compatible thin rod but with a different axis choice so we tin can compare the results. We would expect the moment of inertia to exist smaller about an axis through the eye of mass than the endpoint axis, just as it was for the barbell example at the start of this section. This happens considering more mass is distributed farther from the axis of rotation.
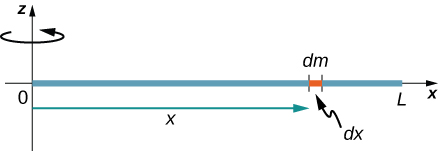
A compatible thin rod with axis at the end
Now consider the aforementioned compatible thin rod of mass Chiliad and length L, simply this fourth dimension we move the axis of rotation to the finish of the rod. We wish to find the moment of inertia nigh this new axis ((Figure)). The quantity dm is again defined to be a small element of mass making up the rod. Just equally before, we obtain
However, this time we have unlike limits of integration. The rod extends from
to
![\[x=L\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-718cc9ed602817fc7635fcd561149d89_l3.png "Rendered by QuickLaTeX.com")
, since the axis is at the end of the rod at
. Therefore we notice
![\[\begin{array}{cc}\hfill I& =\underset{0}{\overset{L}{\int }}{x}^{2}\lambda dx=\lambda \frac{{x}^{3}}{3}{|}_{0}^{L}=\lambda (\frac{1}{3})[{(L)}^{3}-{(0)}^{3}]\hfill \\ & =\lambda (\frac{1}{3}){L}^{3}=\frac{M}{L}(\frac{1}{3}){L}^{3}=\frac{1}{3}M{L}^{2}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a31bf77c836ffc607ca915032ca41501_l3.png "Rendered by QuickLaTeX.com")
Annotation the rotational inertia of the rod about its endpoint is larger than the rotational inertia nigh its heart (consistent with the barbell example) past a factor of four.
The Parallel-Axis Theorem
The similarity betwixt the process of finding the moment of inertia of a rod about an centrality through its middle and about an axis through its end is striking, and suggests that there might be a simpler method for determining the moment of inertia for a rod well-nigh any centrality parallel to the axis through the center of mass. Such an centrality is called a parallel axis. There is a theorem for this, called the parallel-axis theorem, which nosotros land here but do non derive in this text.
Parallel-Axis Theorem
Let 1000 exist the mass of an object and let d exist the altitude from an axis through the object'due south centre of mass to a new axis. And so we take
![\[{I}_{\text{parallel-axis}}={I}_{\text{center of mass}}+m{d}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-e54f92d76fda2dd3d4e2fa7a4a25c09c_l3.png "Rendered by QuickLaTeX.com")
Permit's apply this to the rod examples solved higher up:
![\[{I}_{\text{end}}={I}_{\text{center of mass}}+m{d}^{2}=\frac{1}{12}m{L}^{2}+m{(\frac{L}{2})}^{2}=(\frac{1}{12}+\frac{1}{4})m{L}^{2}=\frac{1}{3}m{L}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-770e45e5e2c8a84528ee5b66de7d0d2e_l3.png "Rendered by QuickLaTeX.com")
This result agrees with our more lengthy calculation from in a higher place. This is a useful equation that we apply in some of the examples and issues.
Check Your Understanding
What is the moment of inertia of a cylinder of radius R and mass yard virtually an axis through a point on the surface, as shown below?
[reveal-answer q="530534″]Testify Answer[/reveal-answer]
[hidden-reply a="530534″]
![\[{I}_{\text{parallel-axis}}={I}_{\text{center of mass}}+m{d}^{2}=m{R}^{2}+m{R}^{2}=2m{R}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-68590209a005757d496f8758e7b488f8_l3.png "Rendered by QuickLaTeX.com")
[/hidden-respond]
A uniform thin deejay near an centrality through the center
Integrating to notice the moment of inertia of a two-dimensional object is a little bit trickier, merely ane shape is commonly done at this level of study—a compatible sparse deejay near an axis through its center ((Figure)).
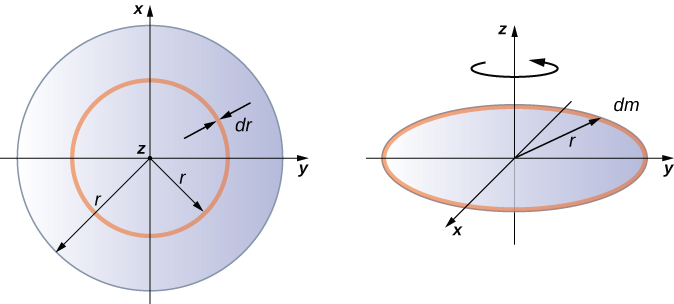
Since the disk is thin, nosotros can have the mass as distributed entirely in the xy-aeroplane. Nosotros again outset with the human relationship for the surface mass density, which is the mass per unit surface area. Since information technology is uniform, the surface mass density
![\[\sigma\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-668d55b962235eb08e8c2c53b6033310_l3.png "Rendered by QuickLaTeX.com")
is constant:
![\[\sigma =\frac{m}{A}\quad \text{or}\quad \sigma A=m,\,\text{so}\,dm=\sigma (dA).\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ccc6318f8e30421a31f81a86660dfe12_l3.png "Rendered by QuickLaTeX.com")
Now nosotros apply a simplification for the surface area. The area can be thought of every bit made up of a series of thin rings, where each ring is a mass increase dm of radius r equidistanct from the axis, every bit shown in part (b) of the effigy. The infinitesimal expanse of each ring dA is therefore given past the length of each ring (
![\[2\pi r\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-698e86d0b8fb958c56f09bf2a277b41e_l3.png "Rendered by QuickLaTeX.com")
) times the infinitesimmal width of each ring dr:
![\[A=\pi {r}^{2},dA=d(\pi {r}^{2})=\pi d{r}^{2}=2\pi rdr.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-7454616065db0edf63c00d1c09ea1707_l3.png "Rendered by QuickLaTeX.com")
The full area of the disk is then fabricated up from adding all the thin rings with a radius range from 0 to R. This radius range then becomes our limits of integration for dr, that is, we integrate from
![\[r=0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-e328532cc2840b49e9a9058cb082b8c1_l3.png "Rendered by QuickLaTeX.com")
to
![\[r=R\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-5904e8794585a05cadcf3e5b0d0fa118_l3.png "Rendered by QuickLaTeX.com")
. Putting this all together, we have
![\[\begin{array}{cc}\hfill I& =\underset{0}{\overset{R}{\int }}{r}^{2}\sigma (2\pi r)dr=2\pi \sigma \underset{0}{\overset{R}{\int }}{r}^{3}dr=2\pi \sigma \frac{{r}^{4}}{4}{|}_{0}^{R}=2\pi \sigma (\frac{{R}^{4}}{4}-0)\hfill \\ & =2\pi \frac{m}{A}(\frac{{R}^{4}}{4})=2\pi \frac{m}{\pi {R}^{2}}(\frac{{R}^{4}}{4})=\frac{1}{2}m{R}^{2}.\hfill \end{array}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8618811a2536ded6b69c8122860e46c7_l3.png "Rendered by QuickLaTeX.com")
Annotation that this agrees with the value given in (Effigy).
Calculating the moment of inertia for compound objects
Now consider a chemical compound object such as that in (Effigy), which depicts a thin disk at the end of a thin rod. This cannot be hands integrated to find the moment of inertia because it is not a uniformly shaped object. However, if we go back to the initial definition of moment of inertia as a summation, we can reason that a compound object's moment of inertia tin be found from the sum of each part of the object:
![\[{I}_{\text{total}}=\sum _{i}{I}_{i}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-c42e6d76ffad0b396799711af66a010e_l3.png "Rendered by QuickLaTeX.com")
It is important to notation that the moments of inertia of the objects in (Figure) are about a common axis. In the case of this object, that would be a rod of length 50 rotating about its end, and a thin disk of radius R rotating virtually an centrality shifted off of the center by a distance
![\[L+R\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-819b67abaa5715c5964550261c91cb43_l3.png "Rendered by QuickLaTeX.com")
, where R is the radius of the disk. Let'south ascertain the mass of the rod to be
![\[{m}_{\text{r}}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-866c918c853b61edead317fccaff6d2c_l3.png "Rendered by QuickLaTeX.com")
and the mass of the disk to be
![\[{m}_{\text{d}}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-ee61a7f98ccff3a56e08e2f8a3cabd54_l3.png "Rendered by QuickLaTeX.com")
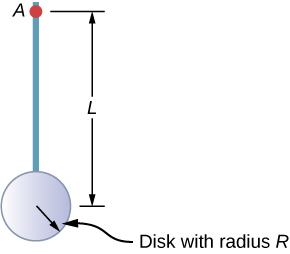
The moment of inertia of the rod is but
![\[\frac{1}{3}{m}_{\text{r}}{L}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-01d7b29b496ab9788d0d54883757f842_l3.png "Rendered by QuickLaTeX.com")
, but we have to use the parallel-axis theorem to find the moment of inertia of the disk nigh the axis shown. The moment of inertia of the deejay near its center is
![\[\frac{1}{2}{m}_{\text{d}}{R}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-77127e2de09e71d77d8d1d7e9d3a837c_l3.png "Rendered by QuickLaTeX.com")
and we apply the parallel-axis theorem
![\[{I}_{\text{parallel-axis}}={I}_{\text{center of mass}}+m{d}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-340227e44c3b0939562f8a9537da205d_l3.png "Rendered by QuickLaTeX.com")
to detect
![\[{I}_{\text{parallel-axis}}=\frac{1}{2}{m}_{\text{d}}{R}^{2}+{m}_{\text{d}}{(L+R)}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1a92487ff328bf303a0e36b1fa668f5d_l3.png "Rendered by QuickLaTeX.com")
Adding the moment of inertia of the rod plus the moment of inertia of the disk with a shifted axis of rotation, we find the moment of inertia for the compound object to be
![\[{I}_{\text{total}}=\frac{1}{3}{m}_{\text{r}}{L}^{2}+\frac{1}{2}{m}_{\text{d}}{R}^{2}+{m}_{\text{d}}{(L+R)}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-19c3045578d782c88f839b85c510fdb9_l3.png "Rendered by QuickLaTeX.com")
Applying moment of inertia calculations to solve problems
Now permit'due south examine some practical applications of moment of inertia calculations.
Case
Person on a Merry-Go-Round
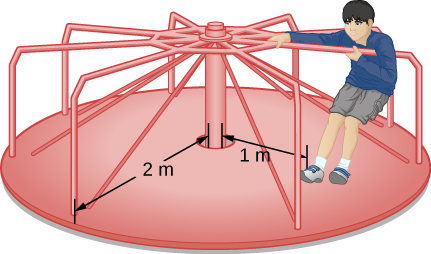
A 25-kg kid stands at a distance
![\[r=1.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-dddcc7fdd1946ea1d9f43b9ce6fb405c_l3.png "Rendered by QuickLaTeX.com")
from the centrality of a rotating merry-go-round ((Figure)). The merry-become-round can be approximated as a compatible solid deejay with a mass of 500 kg and a radius of ii.0 thou. Find the moment of inertia of this system.
Strategy
This problem involves the calculation of a moment of inertia. We are given the mass and distance to the axis of rotation of the child as well as the mass and radius of the merry-go-circular. Since the mass and size of the child are much smaller than the merry-become-circular, we tin can approximate the kid equally a point mass. The notation we use is
![\[{m}_{\text{c}}=25\,\text{kg},{r}_{\text{c}}=1.0\,\text{m},{m}_{\text{m}}=500\,\text{kg},{r}_{\text{m}}=2.0\,\text{m}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-96cefa18e5603f2505820b0a09ee6b55_l3.png "Rendered by QuickLaTeX.com")
.
Our goal is to discover
![\[{I}_{\text{total}}=\sum _{i}{I}_{i}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-cfb779b3a5bc3c10bb7ddea0785b298b_l3.png "Rendered by QuickLaTeX.com")
.
Solution
For the child,
![\[{I}_{\text{c}}={m}_{\text{c}}{r}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2347ca61a4cc0beab3bc47c55e787ee4_l3.png "Rendered by QuickLaTeX.com")
, and for the merry-go-circular,
![\[{I}_{\text{m}}=\frac{1}{2}{m}_{\text{m}}{r}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2da47dbcfd784cf3268bb8a619374189_l3.png "Rendered by QuickLaTeX.com")
. Therefore
![\[{I}_{\text{total}}=25{(1)}^{2}+\frac{1}{2}(500){(2)}^{2}=25+1000=1025\,\text{kg}·{\text{m}}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-d2a11332cb4998de67ab8bda6c3638ea_l3.png "Rendered by QuickLaTeX.com")
Significance
The value should exist shut to the moment of inertia of the merry-go-round by itself because it has much more mass distributed abroad from the axis than the child does.
Example
Rod and Solid Sphere
Discover the moment of inertia of the rod and solid sphere combination about the ii axes as shown below. The rod has length 0.v m and mass ii.0 kg. The radius of the sphere is 20.0 cm and has mass 1.0 kg.
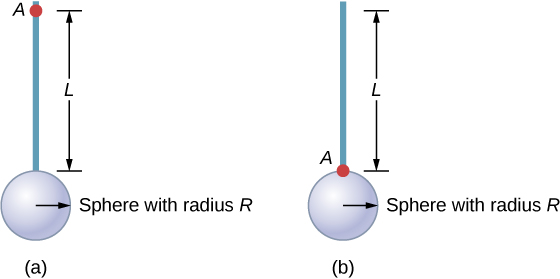
Strategy
Since we have a chemical compound object in both cases, nosotros can use the parallel-axis theorem to find the moment of inertia well-nigh each centrality. In (a), the heart of mass of the sphere is located at a distance
from the axis of rotation. In (b), the center of mass of the sphere is located a distance R from the centrality of rotation. In both cases, the moment of inertia of the rod is about an axis at i terminate. Refer to (Figure) for the moments of inertia for the private objects.
-
![\[{I}_{\text{total}}=\sum _{i}{I}_{i}={I}_{\text{Rod}}+{I}_{\text{Sphere}}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-caf57af8d65ed8c6ab9a948159b67631_l3.png "Rendered by QuickLaTeX.com")
;
![\[{I}_{\text{Sphere}}={I}_{\text{center of mass}}+{m}_{\text{Sphere}}{(L+R)}^{2}=\frac{2}{5}{m}_{\text{Sphere}}{R}^{2}+{m}_{\text{Sphere}}{(L+R)}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-87b3d0d2ea3a04f2bf714303e6250306_l3.png "Rendered by QuickLaTeX.com")
;
![\[{I}_{\text{total}}={I}_{\text{Rod}}+{I}_{\text{Sphere}}=\frac{1}{3}{m}_{\text{Rod}}{L}^{2}+\frac{2}{5}{m}_{\text{Sphere}}{R}^{2}+{m}_{\text{Sphere}}{(L+R)}^{2};\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1317fd8b4e7055d987f8a753fcd51531_l3.png "Rendered by QuickLaTeX.com")
![\[{I}_{\text{total}}=\frac{1}{3}(2.0\,\text{kg}){(0.5\,\text{m})}^{2}+\frac{2}{5}(1.0\,\text{kg})(0.2\,{\text{m})}^{2}+(1.0\,\text{kg}){(0.5\,\text{m}+0.2\,\text{m})}^{2};\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9a49b67814683951c8dc2d8d8501af96_l3.png "Rendered by QuickLaTeX.com")
![\[{I}_{\text{total}}=(0.167+0.016+0.490)\,\text{kg}·{\text{m}}^{2}=0.673\,\text{kg}·{\text{m}}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-5770d023e210204ce4cfcba191d65636_l3.png "Rendered by QuickLaTeX.com")
-
![\[{I}_{\text{Sphere}}=\frac{2}{5}{m}_{\text{Sphere}}{R}^{2}+{m}_{\text{Sphere}}{R}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-be678294ed8c540c7fa0a5e1c59dfb7e_l3.png "Rendered by QuickLaTeX.com")
;
![\[{I}_{\text{total}}={I}_{\text{Rod}}+{I}_{\text{Sphere}}=\frac{1}{3}{m}_{\text{Rod}}{L}^{2}+\frac{2}{5}{m}_{\text{Sphere}}{R}^{2}+{m}_{\text{Sphere}}{R}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-235f39e668041eb0c05f2d0315fffd44_l3.png "Rendered by QuickLaTeX.com")
;
![\[{I}_{\text{total}}=\frac{1}{3}(2.0\,\text{kg}){(0.5\,\text{m})}^{2}+\frac{2}{5}(1.0\,\text{kg})(0.2\,{\text{m})}^{2}+(1.0\,\text{kg}){(0.2\,\text{m})}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9dbb8928f558135c83421c2409ac556e_l3.png "Rendered by QuickLaTeX.com")
;
![\[{I}_{\text{total}}=(0.167+0.016+0.04)\,\text{kg}·{\text{m}}^{2}=0.223\,\text{kg}·{\text{m}}^{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bf99ea6fe1feffb25720923242debbba_l3.png "Rendered by QuickLaTeX.com")
Significance
Using the parallel-axis theorem eases the computation of the moment of inertia of compound objects. We encounter that the moment of inertia is greater in (a) than (b). This is considering the axis of rotation is closer to the center of mass of the arrangement in (b). The unproblematic analogy is that of a rod. The moment of inertia almost one end is
![\[\frac{1}{3}m{L}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8ca6d7ce02b710af4f8ff7270c6c7d47_l3.png "Rendered by QuickLaTeX.com")
, but the moment of inertia through the heart of mass along its length is
![\[\frac{1}{12}m{L}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-caeb0d296a73f15b9e572d38c4eefe61_l3.png "Rendered by QuickLaTeX.com")
.
Example
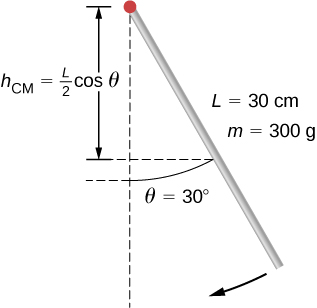
Angular Velocity of a Pendulum
A pendulum in the shape of a rod ((Figure)) is released from residuum at an angle of
![\[30\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-c94934d8a2dddef67c8b7502e575de0e_l3.png "Rendered by QuickLaTeX.com")
. Information technology has a length 30 cm and mass 300 yard. What is its angular velocity at its everyman point?
![\[30\text{°}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-a3e484fbcf5d6b45b6cbeb7207c585a9_l3.png "Rendered by QuickLaTeX.com")
Strategy
Use conservation of energy to solve the problem. At the point of release, the pendulum has gravitational potential energy, which is determined from the superlative of the center of mass above its lowest indicate in the swing. At the bottom of the swing, all of the gravitational potential energy is converted into rotational kinetic free energy.
Solution
The change in potential energy is equal to the alter in rotational kinetic energy,
![\[\Delta U+\Delta K=0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-1423e909cc7b74a7717ee1ec5747b26a_l3.png "Rendered by QuickLaTeX.com")
.
At the top of the swing:
![\[U=mg{h}_{\text{cm}}=mg\frac{L}{2}(\text{cos}\,\theta )\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-8e5bf742e8dfc7a8c23ba9fd30c072df_l3.png "Rendered by QuickLaTeX.com")
. At the lesser of the swing,
![\[U=mg\frac{L}{2}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-61abc3f9285fef1c6a47c4294e40fdcb_l3.png "Rendered by QuickLaTeX.com")
At the top of the swing, the rotational kinetic energy is
![\[K=0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-2e6864e120c5210cae4ebb8b1c689bc0_l3.png "Rendered by QuickLaTeX.com")
. At the bottom of the swing,
![\[K=\frac{1}{2}I{\omega }^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-3a34fbdea32374bf8b38937dc47b6896_l3.png "Rendered by QuickLaTeX.com")
. Therefore:
![\[\text{Δ}U+\text{Δ}K=0⇒(mg\frac{L}{2}(1-\text{cos}\,\theta )-0)+(0-\frac{1}{2}I{\omega }^{2})=0\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0b45f13aa3e1bf34b1f44c0d4949bb5d_l3.png "Rendered by QuickLaTeX.com")
or
![\[\frac{1}{2}I{\omega }^{2}=mg\frac{L}{2}(1-\text{cos}\,\theta ).\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-0a0c84f780edd284f35355d3c91ceff4_l3.png "Rendered by QuickLaTeX.com")
Solving for
![\[\omega\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-231d76a1dcdb84e30834c95bc7591fce_l3.png "Rendered by QuickLaTeX.com")
, nosotros take
![\[\omega =\sqrt{mg\frac{L}{I}(1-\text{cos}\,\theta )}=\sqrt{mg\frac{L}{1\text{/}3m{L}^{2}}(1-\text{cos}\,\theta )}=\sqrt{g\frac{3}{L}(1-\text{cos}\,\theta )}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-adc050d1170189f293e6b01b7818328c_l3.png "Rendered by QuickLaTeX.com")
Inserting numerical values, we accept
![\[\omega =\sqrt{9.8\,\text{m}\text{/}{\text{s}}^{2}\frac{3}{0.3\,\text{m}}(1-\text{cos}\,30)}=3.6\,\text{rad}\text{/}\text{s}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-993ad56048553e11c030ca57aa2f74e8_l3.png "Rendered by QuickLaTeX.com")
Significance
Notation that the angular velocity of the pendulum does not depend on its mass.
Summary
- Moments of inertia can be found past summing or integrating over every 'piece of mass' that makes up an object, multiplied by the square of the distance of each 'piece of mass' to the axis. In integral class the moment of inertia is
![\[I=\int {r}^{2}dm\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-fdd33bda42d82668294846363d82ae79_l3.png "Rendered by QuickLaTeX.com")
.
- Moment of inertia is larger when an object's mass is farther from the axis of rotation.
- It is possible to detect the moment of inertia of an object about a new axis of rotation once it is known for a parallel centrality. This is called the parallel centrality theorem given past
, where d is the distance from the initial axis to the parallel centrality.
- Moment of inertia for a compound object is just the sum of the moments of inertia for each private object that makes upwards the compound object.
Conceptual Questions
If a kid walks toward the center of a merry-go-round, does the moment of inertia increase or decrease?
A discus thrower rotates with a discus in his hand before letting information technology become. (a) How does his moment of inertia change after releasing the discus? (b) What would be a good approximation to use in calculating the moment of inertia of the discus thrower and discus?
[reveal-answer q="fs-id1167133845959″]Testify Solution[/reveal-answer]
[hidden-answer a="fs-id1167133845959″]
a. Information technology decreases. b. The arms could be approximated with rods and the discus with a disk. The torso is almost the centrality of rotation then information technology doesn't contribute much to the moment of inertia.
[/hidden-respond]
Does increasing the number of blades on a propeller increase or subtract its moment of inertia, and why?
The moment of inertia of a long rod spun around an axis through one stop perpendicular to its length is
![\[m{L}^{2}\text{/}3\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f8e059373d881fc35b28312a1a767306_l3.png "Rendered by QuickLaTeX.com")
. Why is this moment of inertia greater than it would be if y'all spun a point mass chiliad at the location of the eye of mass of the rod (at Fifty/2) (that would exist
![\[m{L}^{2}\text{/}4\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-dd4c68962405d7e85cc125c79a486bf7_l3.png "Rendered by QuickLaTeX.com")
)?
[reveal-respond q="fs-id1167133354662″]Show Solution[/reveal-answer]
[hidden-answer a="fs-id1167133354662″]
Considering the moment of inertia varies as the square of the altitude to the centrality of rotation. The mass of the rod located at distances greater than Fifty/2 would provide the larger contribution to make its moment of inertia greater than the point mass at L/2.
[/hidden-answer]
Why is the moment of inertia of a hoop that has a mass M and a radius R greater than the moment of inertia of a deejay that has the same mass and radius?
Issues
While punting a football game, a kicker rotates his leg nearly the hip joint. The moment of inertia of the leg is
![\[3.75{\,\text{kg-m}}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-176491a3a38fe7a6c6114573ac27effb_l3.png "Rendered by QuickLaTeX.com")
and its rotational kinetic energy is 175 J. (a) What is the angular velocity of the leg? (b) What is the velocity of tip of the punter'southward shoe if it is one.05 m from the hip articulation?
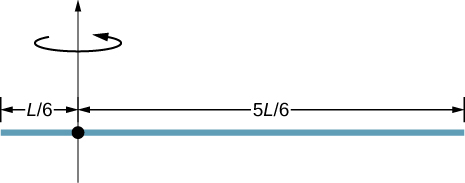
Using the parallel axis theorem, what is the moment of inertia of the rod of mass m about the axis shown below?
[reveal-answer q="96051″]Show Answer[/reveal-answer]
[hidden-reply a="96051″]
![\[I=\frac{7}{36}m{L}^{2}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-f7178c47c8949995ff120bb8d15090d2_l3.png "Rendered by QuickLaTeX.com")
[/hidden-answer]
Find the moment of inertia of the rod in the previous problem by direct integration.
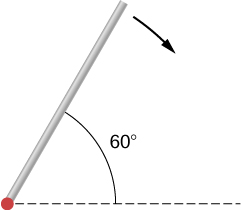
A compatible rod of mass one.0 kg and length two.0 grand is free to rotate about 1 cease (see the following figure). If the rod is released from rest at an angle of
![\[60\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-9ed7cbabc9ada23cb96d44819c58f695_l3.png "Rendered by QuickLaTeX.com")
with respect to the horizontal, what is the speed of the tip of the rod equally it passes the horizontal position?
[reveal-answer q="71295″]Testify Answer[/reveal-answer]
[subconscious-answer a="71295″]
![\[v=7.14\,\text{m}\text{/}\text{s}.\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-49acfda450383d8a2db7ef70d069540b_l3.png "Rendered by QuickLaTeX.com")
[/subconscious-answer]
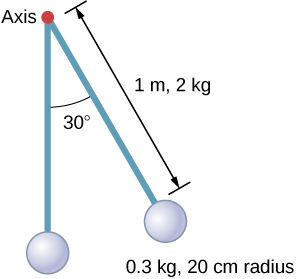
A pendulum consists of a rod of mass 2 kg and length one m with a solid sphere at 1 end with mass 0.iii kg and radius 20 cm (see the post-obit figure). If the pendulum is released from residual at an bending of
, what is the angular velocity at the everyman signal?
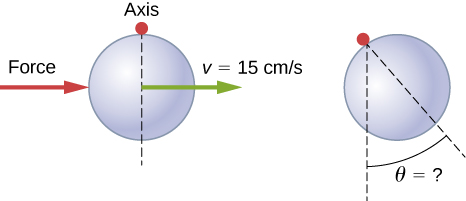
A solid sphere of radius 10 cm is allowed to rotate freely about an axis. The sphere is given a sharp blow then that its center of mass starts from the position shown in the following figure with speed xv cm/due south. What is the maximum bending that the diameter makes with the vertical?
[reveal-reply q="602090″]Show Answer[/reveal-respond]
[hidden-respond a="602090″]
![\[\theta =10.2\text{°}\]](https://opentextbc.ca/universityphysicsv1openstax/wp-content/ql-cache/quicklatex.com-bbbc277bf5c6ab2f9eab64f7d31838f9_l3.png "Rendered by QuickLaTeX.com")
[/hidden-answer]
Calculate the moment of inertia by straight integration of a thin rod of mass M and length Fifty most an axis through the rod at 50/three, as shown beneath. Check your respond with the parallel-axis theorem.

Glossary
- linear mass density
- the mass per unit length
of a one dimensional object
- parallel axis
- axis of rotation that is parallel to an centrality almost which the moment of inertia of an object is known
- parallel-axis theorem
- if the moment of inertia is known for a given axis, it can exist found for any centrality parallel to information technology
- surface mass density
- mass per unit area
of a two dimensional object
Source: https://opentextbc.ca/universityphysicsv1openstax/chapter/10-5-calculating-moments-of-inertia/
0 Response to "if = 72° and s = 20 cm, what is the value of r to the nearest tenth of a centimeter?"
Postar um comentário